日欧共同の水星探査計画「ベピコロンボ(BepiColombo)」が、2024年9月5日(日本時間、以下同じ)に水星での4度目のフライバイ(スイングバイ)を行います。フライバイは、惑星など天体の重力を利用して探査機の速度や進行方向を変更する技術です。水星への最接近は9月5日6時48分に予定されています。最接近時、ベピコロンボは水星表面から165kmまで近づきます。
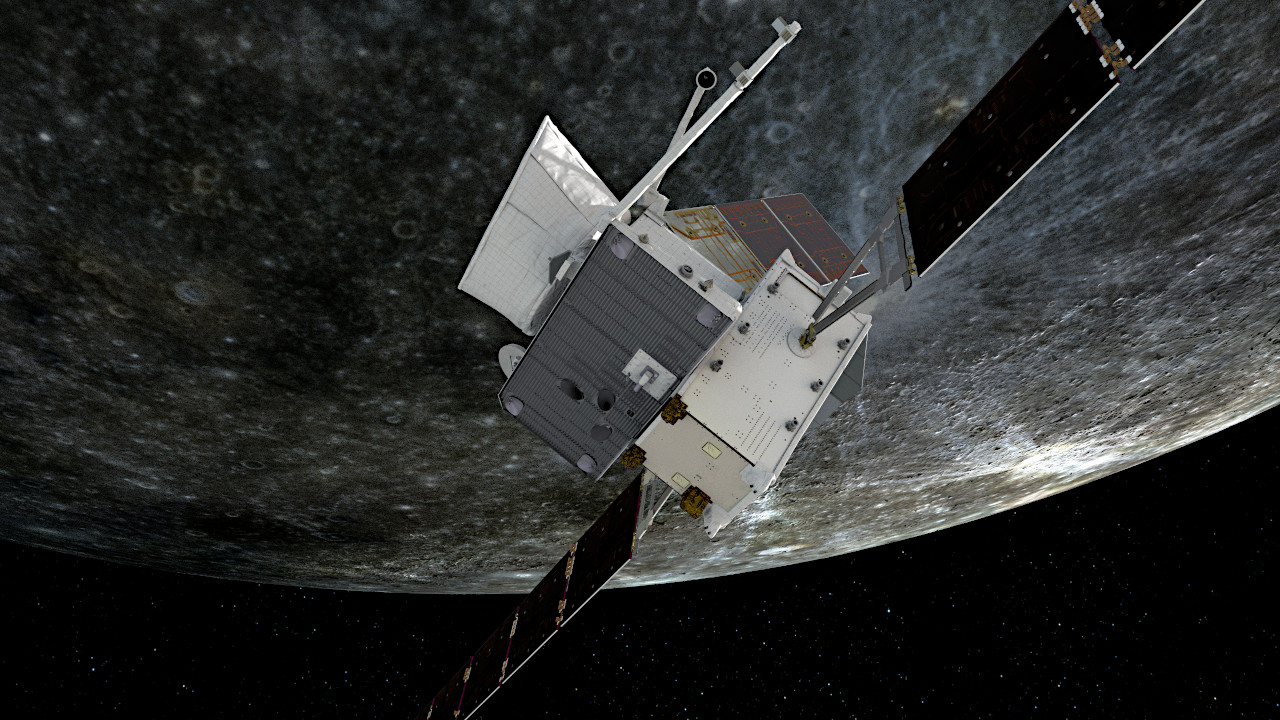
ベピコロンボは、日本のJAXA(宇宙航空研究開発機構)の水星磁気圏探査機「みお」(MMO:Mercury Magnetospheric Orbiter)と、ESA(ヨーロッパ宇宙機関)の水星表面探査機(MPO:Mercury Planetary Orbiter)という2機のオービターで水星の観測を行うミッションです。
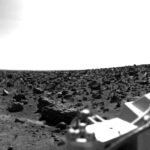
今回のフライバイでは、水星の南極上空を通過します。その際、科学観測用のメインのカメラは使えませんが、MTMに設置されている3つのモニタリングカメラ(M-CAM)で水星を撮影する予定です。M-CAMは、太陽電池アレイやアンテナなどを監視するためのカメラです。
水星の周回軌道投入は2026年11月に
実は今回のフライバイでの最接近時の距離は、当初の予定よりも35kmほど表面に近くなっています。この変更は、2024年4月にベピコロンボに起きた不具合に関係しています。(参考記事)水星探査機ベピコロンボに不具合が発生
現在ベピコロンボは、「みお」とMPO、そして電気推進モジュール(MTM)が結合した状態で水星に向かっています。今年4月、イオンエンジンに十分な電力を供給できない問題がMTMに発生。その後の検討の結果、MTMのイオンエンジンの出力を下げて運用する方針になりました。
ただその場合、当初予定していた2025年12月の水星軌道投入ができなくなり、約1年遅れの2026年11月に水星に到着する軌道に変更されることになりました。今回の4度目のフライバイでは、最接近時の距離をより近づけて、その後のイオンエンジンの出力を節約することになったのです。
2018年10月に打ち上げられたベピコロンボは、地球で1回、金星で2回、水星で6回の合計9回のフライバイを行った後で、水星に到着することになっています。水星での5回目のフライバイは2024年12月、6回目は2025年1月に実施される予定です。
なお到着が1年遅れたとしても、「みお」やMPOの運用には支障はなく、それぞれ計画通りの科学観測を実施する予定とのことです。
(参考記事)
水星探査機ベピコロンボ、地球スイングバイ完了
水星探査機ベピコロンボの金星最接近時の動画が公開された
ベピコロンボの2回目の金星フライバイ時のアニメーションが公開された
ベピコロンボの水星フライバイ時の映像が公開された
ベピコロンボの2回目の水星フライバイ時の映像公開!
ベピコロンボから届いた3度目の水星フライバイ映像
モニタリングカメラの位置
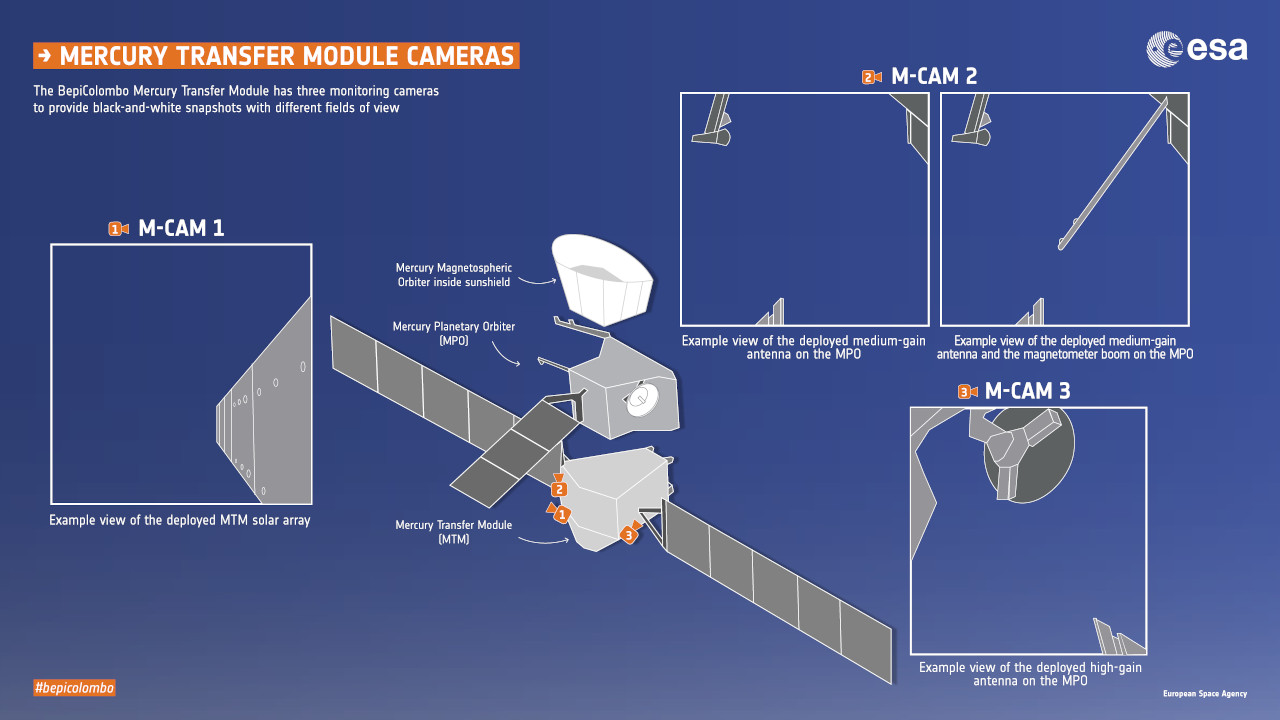
この図は、航行中のベピコロンボの構成を示したものです。
図には上から、「みお」を中に納めたサンシールド、MPO、MTMが描かれています。MTMの部分でオレンジ色で示されているのが3台のモニタリングカメラの位置で、数字はM-CAM1〜M-CAM3を示しています。
白枠内は各M-CAMの視野を示しており、機体の一部がどのように映るかの例も示されています。M-CAM2にはMPOの磁気センサーや中利得アンテナが、M-CAM3にはMPOの高利得アンテナが映り込みます。
今回の水星でのフライバイでは、最接近の2分後、ベピコロンボが水星表面から約200kmの地点で、M-CAM2とM-CAM3での撮影がスタートします。M-CAM1では、遠ざかる水星が撮影されます。それらの画像が公開されたら、アストロピクスでも紹介する予定です。
Main Image Credit: ESA/ATG medialab
 大宇宙 写真集500【改訂新版】
大宇宙 写真集500【改訂新版】 探査機が見た太陽系【第4版】
探査機が見た太陽系【第4版】 ジェイムズ・ウェッブ宇宙望遠鏡がみた宇宙【改訂版】
ジェイムズ・ウェッブ宇宙望遠鏡がみた宇宙【改訂版】