2021年5月22日、NASA(アメリカ航空宇宙局)の火星ヘリコプター「インジェニュイティ」の6回目の飛行が行われました。これまでの5回の飛行では、特にトラブルはなく順調に飛行を続けてきたインジェニュイティですが、今回の飛行では飛行の途中でトラブルが発生したようです。NASA・JPL(ジェット推進研究所)火星ヘリコプター・チーフパイロットのHåvard Grip氏が書いた、6回目の飛行についての記事をもとに、6回目の飛行について簡単に紹介しましょう。
6回目の飛行でインジェニュイティは、高さ10mまで上昇したのち、南西へ150mの距離を秒速4mで移動するよう指示が送られていました。そこから西方面の画像を撮影しつつ南へ15m移動し、その後、北東へ50m飛行して着陸する予定でした。
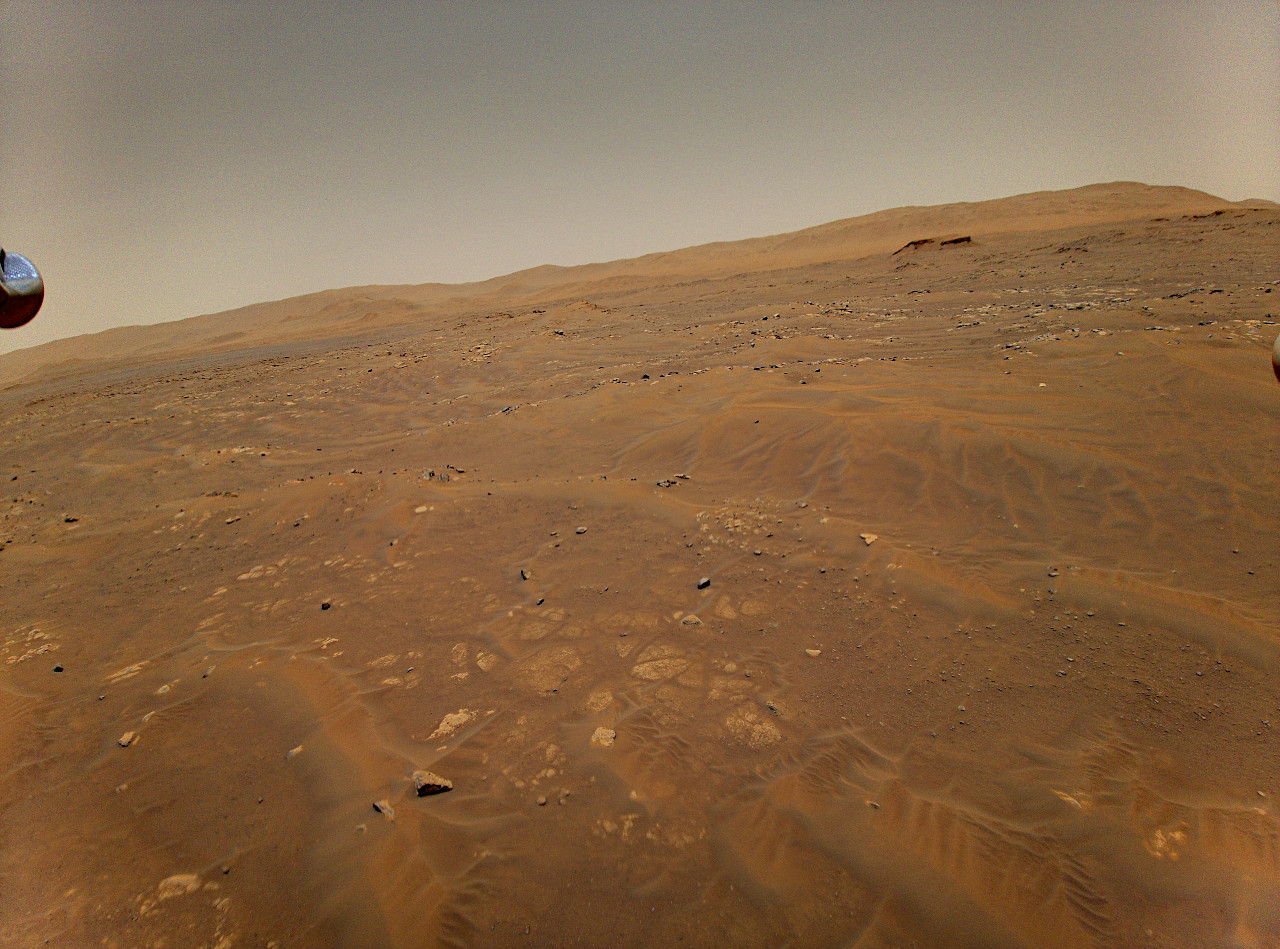
この画像は、インジェニュイティの6回目の飛行の際に高度10mから撮影されたものです。インジェニュイティの飛行は、最初の150mについては問題なく行われました。しかしフライトが終盤に差し掛かったころ、インジェニュイティは前後に振動するように傾き始め、電力消費量が急増しました。
インジェニュイティは、慣性計測装置(IMU)を使って動きを把握します。ただIMUだけでは誤差が蓄積してしまうため、インジェニュイティはナビゲーションカメラの情報(画像やタイムスタンプなど)を使って誤差を補正して精度を維持しています。
今回の飛行では、飛行開始から約54秒後に不具合が発生し、ナビゲーションカメラの画像が1枚失われました。それにより、以降の全てのナビゲーション画像に不正確なタイムスタンプが付けられることになりました。そのためナビゲーション画像を使って補正を行うたびに、撮影時刻に関する誤った情報に基づいて動作してしまいました。そのことが大きな振動の発生につながったのです。
ただ異常の発生にもかかわらず、インジェニュイティは飛行を維持し、着陸予定地点から約5m以内の場所に着陸することができました。ヘリコプターの飛行制御システムには十分な「安定余裕」が確保されており、タイミングのずれも含めて不安定になることなく重大なエラーを許容するよう設計されています。そのことが無事着陸できた理由の一つでした。
またインジェニュイティは、着陸に向けた降下の最終段階ではナビゲーション画像を使わないように設計されています。最後にカメラの画像を無視したことで振動が止まって姿勢が安定し、設計通りの速度で着陸することになったのです。
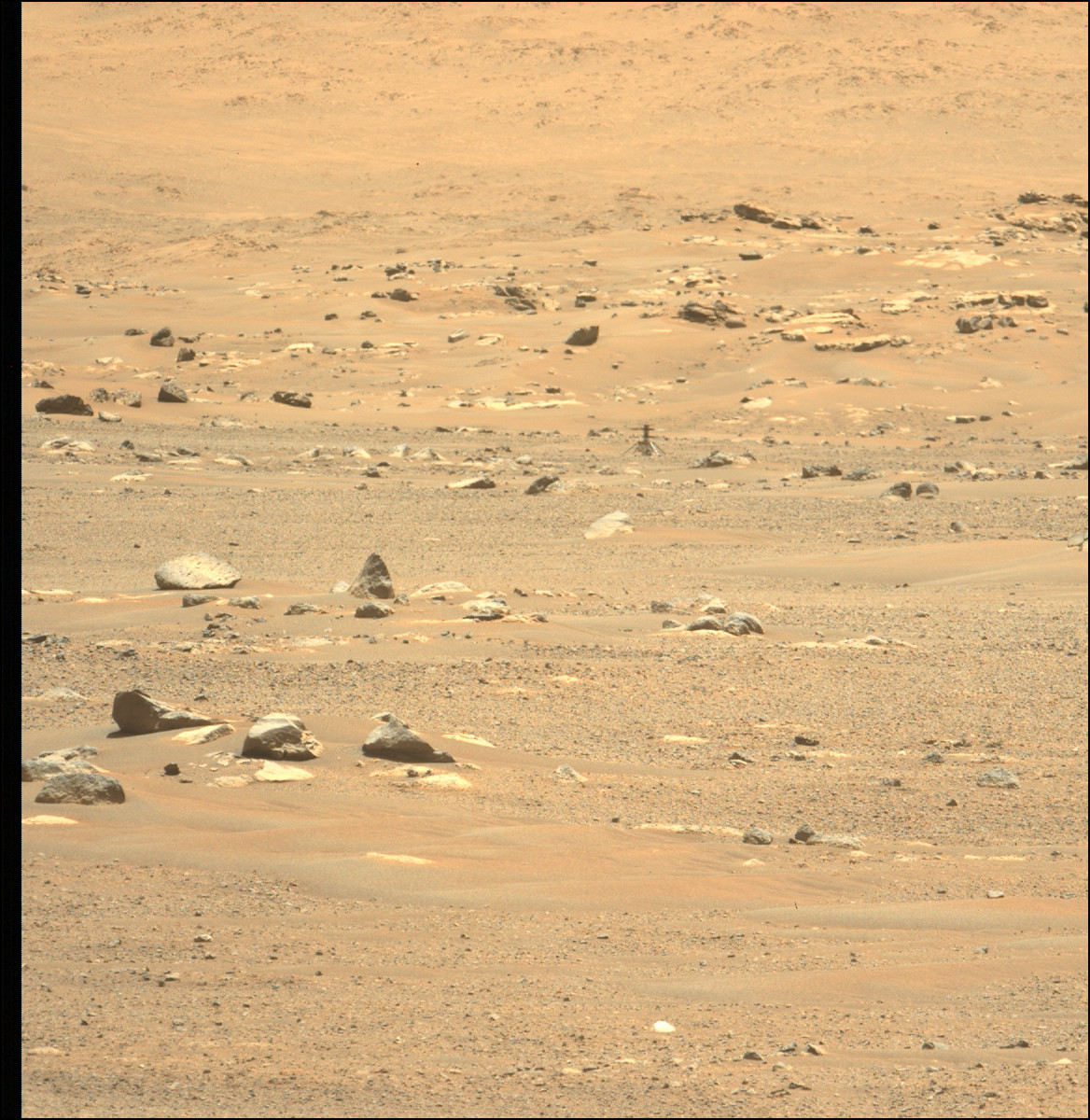
画像中央やや右上に、無事着陸したインジェニュイティが映っています。Grip氏は6回目の飛行を通じ、対応が必要な脆弱性が明らかになった一方で、システムの堅牢性も確認できたとしています。
 大宇宙 写真集500【改訂新版】
大宇宙 写真集500【改訂新版】 探査機が見た太陽系【第4版】
探査機が見た太陽系【第4版】 ジェイムズ・ウェッブ宇宙望遠鏡がみた宇宙【改訂版】
ジェイムズ・ウェッブ宇宙望遠鏡がみた宇宙【改訂版】