2021年2月18日(日本時間19日)に火星着陸に成功したNASA(アメリカ航空宇宙局)の火星ローバー(探査車)パーサヴィアランス(Perseverance)は、火星への着陸時に「地形照合航法(Terrain Relative Navigation)」という新しい技術を使いました。
地形照合航法は、パーサヴィアランスが火星の大気中を降下した際に撮影した画像をローバーに保存されている地図と比較しながら、必要に応じてコースを調整する技術です。この新技術によって着陸時の危険を回避し、安全な着陸場所を見つけることができたのです。
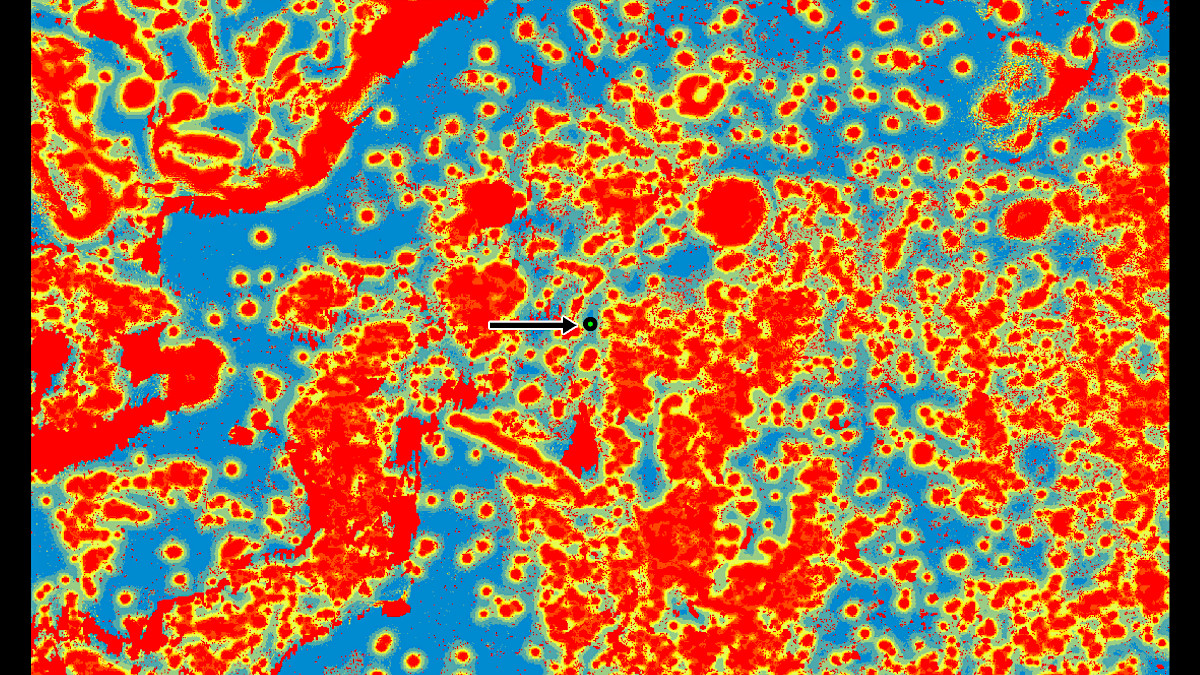
画像の青い部分は安全な領域で、赤い部分は危険度が高いとみられる領域です。パーサヴィアランスの着陸地点は緑の点(矢印の先)で示されています。
※Perseveranceは媒体によって「パーセベランス」「パーサビアランス」「パーシビアランス」「パーセヴェランス」などと表記されています。
Image Credit: NASA/JPL-Caltech
(参照)NASA JPL
 大宇宙 写真集500【改訂新版】
大宇宙 写真集500【改訂新版】 探査機が見た太陽系【第4版】
探査機が見た太陽系【第4版】 ジェイムズ・ウェッブ宇宙望遠鏡がみた宇宙【改訂版】
ジェイムズ・ウェッブ宇宙望遠鏡がみた宇宙【改訂版】
