
JAXA(宇宙航空研究開発機構)は1月25日、小型月着陸実証機SLIMが100m精度のピンポイント着陸に成功したと発表しました。SLIMは当初の着陸目標地点から東に約55m離れたところに着陸したことが確認されました。なおSLIMは高度50m付近でトラブルが発生したにもかかわらず、目標地点から100m以内に着陸することに成功しました。
SLIMは高度50mでいったんホバリングし、カメラで撮影した画像をもとに障害物の検知を行いました。この障害物検知を実施中の位置精度は、3〜4m程度という非常に高い精度だったと推定されています。
高度50mで何が起きたのか
SLIMにはメインエンジンが2基搭載されています。ホバリング中に、そのうちの1基に何らかの異常が発生し、推力が約55%程度に低下しました。その後、航法カメラで撮影された画像にノズルのようなものが映り込んでいることから、ノズル部が破断して落下したためエンジン1基の推力が失われたと推測されています。原因については現在も調査中とのこと。
SLIMはメインエンジンを1基失ってたとしても一定の冗長性を確保する設計となっており、月面着陸ができなくなる事態は回避されました。ただメインエンジンは2基で横方向の推力を互いに打ち消し合う設計となっていたため、1基を失ったことで水平方向へ流されていくことになりました。
その後SLIMは、少し姿勢を傾けてできるだけ横方向への移動を抑制しながらメインエンジンを噴射し続け、自律的にシーケンスを進めて着陸モードへと移行しました。その間、高度5m付近で2機の小型ロボット「LEV-1」と「LEV-2(SORA-Q)」を放出しました。
SLIMは想定より低速で、ほぼまっすぐ立った姿勢で設地したものの、横方向に流れていたため設地後に姿勢が大きく変動し、想定と異なる向きに太陽電池が向いてしまったとみられています。月面のSLIIMは現在、メインエンジンが上を向いた状態にあり、太陽電池パネルは西を向いていると考えられています。
SLIMが着陸したときには、太陽光は東から射していました。今後、太陽光が西から射すようになれば電力発生が回復し運用を再開できる可能性があるとみられています。電力が発生すれば、SLIMは自動的に起動する予定とのこと。なおSLIMの着陸地点における日没は2月1日です。
SLIMが撮影した月面の画像

こちらは着陸後にSLIMの航法カメラで撮影された月面のようすです。
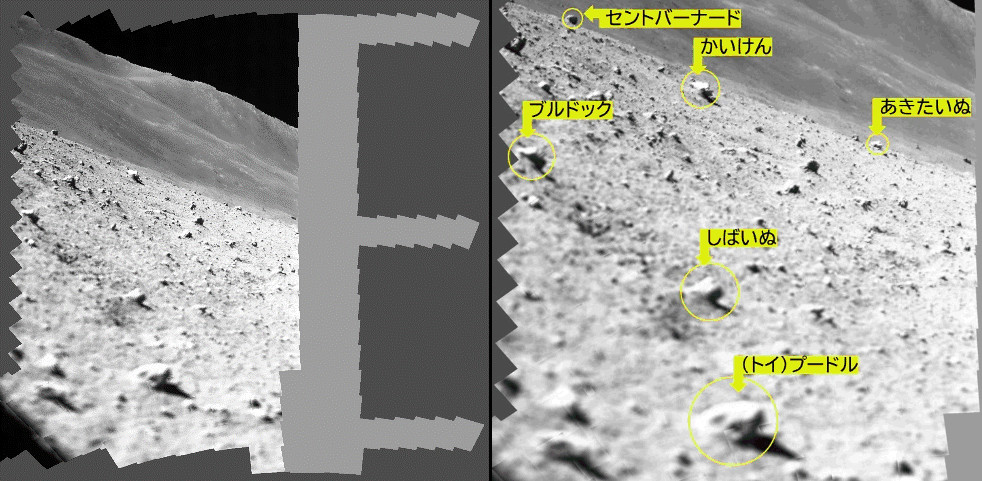
こちらはSLIMに搭載されたマルチバンド分光カメラ(MBC)で撮影された画像です。犬種名で示されている岩は、かつての隕石衝突によって飛び散った、マントルに由来するカンラン石ではないかと考えられているものです。今後、SLIMが復活し観測を再開することになれば、さらに詳細な分光観測を行うことになります。
また冒頭の画像で示したように、LEV-2(SORA-Q)も、SLIMの撮影に成功しました。
(参照)JAXA(1)、(2)、(3)、(4)、小型月着陸実証機(SLIM)および小型プローブ(LEV)の月面着陸の結果・成果等 の記者会見
 大宇宙 写真集500【改訂新版】
大宇宙 写真集500【改訂新版】 探査機が見た太陽系【第4版】
探査機が見た太陽系【第4版】 ジェイムズ・ウェッブ宇宙望遠鏡がみた宇宙【改訂版】
ジェイムズ・ウェッブ宇宙望遠鏡がみた宇宙【改訂版】
